Dalam rangka menyelesaikan tesis, saya mengambil topik Implementasi Obstacle Avoidance pada Soccer Robot. Sebenarnya, tidak mirip-mirip amat dengan soccer robot yang secara rutin dipertandingkan di Robocup (http://robocup.org ). Tapi saya mencoba melakukan satu riset awal dalam implementasi soccer robot, yang diharapkan dapat diteruskan baik oleh saya maupun oleh para penerus saya (ciee... penerus... :D ).
Ya, pada intinya, saya membuat sebuah robot tunggal dengan platform berupa mobile robot ( ini adalah bahasa umum di kalangan researcher robotika untuk robot-robot yang dapat melakukan perpindahan dengan menggunakan roda ). Bentuk jadinya seperti gambar berikut :
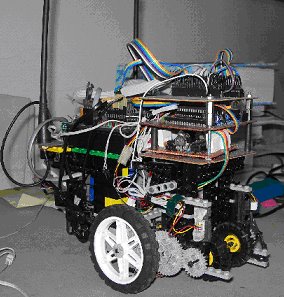
Mengenai detil bangunan robotnya, saya tidak bahas di sini, tapi pada dasarnya, robot saya memiliki :
a. Sensor-sensor : sensor jarak infrared GP2D12 sebanyak 5 buah ( 4 di depan dan 1 di belakang ), sensor kamera CMUCam I yang terpasang statis dan menghadap ke depan, sensor kompas digital Devantech Magnetic Compass CMPS03, sensor bola yang khusus berfungsi mengidentifikasi apakah bola sudah ter-handle atau belum.
b. Sistem pengaturan berupa Handyboard (http://handyboard.com ) yang meng-handle pengambilan data dari semua sensor, mengolah data sensor dan mengambil keputusan berupa perintah kepada aktuator ( roda )
c. Aktuator berupa Dua buah roda aktif . Masing-masing roda aktif diputar dengan menggunakan motor DC.
gie itu bentuk robot loe kemarennn?? yg sempet muter2 itu???
ReplyDeletekapan2 ajakin gue liat robot lo beraksi live donk.
trus robot lo ini kerjanya tunggal yah? atau bisa kerjasama ama robot lainnya jadi satu team? asli masih bingung nih gie.. ajarin dunkkkkk